Wie Roboter lernen
Lernfähige Roboter sind längst keine Science Fiction mehr. Mit KI ausgestattete Robotiksysteme können in immer mehr Anwendungsgebieten jenseits der Industrie zum Einsatz kommen. Ob als Lieferfahrzeuge, in der Pflege, im Katastrophenfall oder im Haushalt – in vielen Bereichen werden uns Roboter unterstützen und anstrengende oder gefährliche Tätigkeiten abnehmen. Ihr Potenzial für Wirtschaft und Gesellschaft ist enorm.
Deutschland ist der größte Robotik-Markt in Europa. Seit vielen Jahren übernehmen automatisierte Roboter – überwiegend starre – Arbeitsabläufe in strukturierten und abgeschirmten Umgebungen, insbesondere in der industriellen Produktion und der Logistik. Die Verzahnung von Robotik mit KI-Methoden wie dem maschinellen Lernen bringt nun eine neue Qualität: Roboter werden lernfähig. Sie können zunehmend komplexe Aufgaben in sich verändernden Umgebungen übernehmen und – dank zunehmend einfacher Bedienung – in enger Kooperation mit dem Menschen agieren.
Fallbeispiele: So können lernfähige Roboter unterstützen
In welchen Branchen und bei welchen Aufgaben können lernfähige Roboter künftig wirksam unterstützen? Expertinnen und Experten der Plattform Lernende Systeme zeigen dies anhand konkreter Use Cases auf, benennen Anforderungen und mögliche Hürden für die Umsetzung in die Praxis.
Handwerk Helfer für die Bearbeitung von Oberflächen
Gesundheit Wearable Robots zur Unterstützung
Kreislaufwirtschaft Wertstoffe besser trennen
Pflege Assistenz zur Entlastung von Fachkräften
Gewässerbewirtschaftung Unbemannte Fahrzeuge für maritime Einsätze
Landwirtschaft Roboter für fachgerechten Baumschnitt
Raumfahrt Selbständigeres Erkunden anderer Planeten
Lernfähig dank KI: Die Zukunft der Robotik
Die aktuelle Aufbruchsstimmung in der Robotik basiert auf folgenden Faktoren:
- Durchbrüche beim maschinellen Lernen
Der technologische Fortschritt der vergangenen Jahre ist enorm und bereits im Alltag spürbar – etwa durch Verbreitung von Chatbots, die auf Sprachmodellen oder multimodalen Modellen wie GPT4o, Gemini, Claude 3.5 oder Llama 3 basieren. Auch die maschinelle Wahrnehmung verbesserte sich, etwa bei der Objekterkennung und Bildsegmentierung. Grundlage dieser Entwicklungen sind eine zunehmend leistungsfähige Hardware sowie Unmengen an Text-, Video- und Bilddaten, die via Internet zur Verfügung stehen. Zudem wurden mit Lernalgorithmen wie den Transformern große Fortschritte hinsichtlich effizienter und skalierbarer Algorithmen erzielt. Die Robotik profitiert von den Entwicklungen beim datengestützten maschinellen Lernen mindestens zweifach: durch die verbesserte Wahrnehmungsfähigkeit von Robotern und die Möglichkeit, diese mit Hilfe großer Sprachmodelle künftig per natürlicher Sprache zu instruieren. Dies verspricht Lösungen für bisher nicht oder nur sehr schwer lösbare Problemstellungen, etwa das Navigieren oder Handeln in komplexen, unstrukturierten Umgebungen. Zudem wird der Einsatz lernfähiger Roboter in sozialen Kontexten und in direkter Interaktion mit Menschen möglich – sei es via Sprache, Gesten oder interaktives Lernen (z.B. durch Vormachen). - Sinkende Kosten für Robotik-Hardware
Grund dafür ist, dass in der Robotik heute viel mehr mit modularen Systemen gearbeitet werden kann. Zudem sinken die Preise für Roboter und einzelne Komponenten. Ein Industrieroboter, der vor zehn Jahren noch 100.000 Euro kostete, kann heute für weniger als 5.000 Euro produziert werden (hierzu auch Panel Von KI-Modellen und lernfähiger Robotik/PLS-Konferenz 2023).
Potenziale für Wirtschaft und Gesellschaft
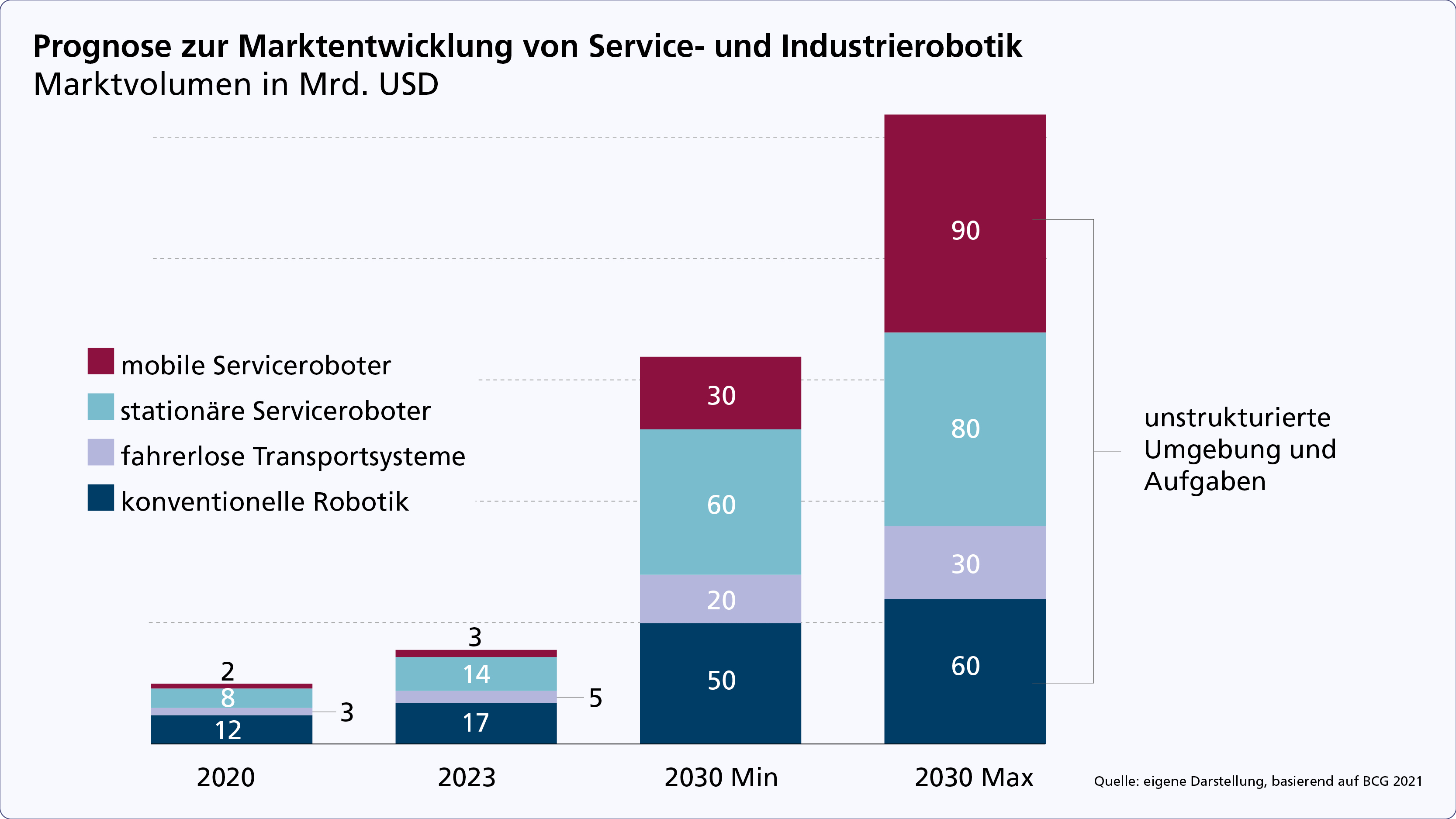
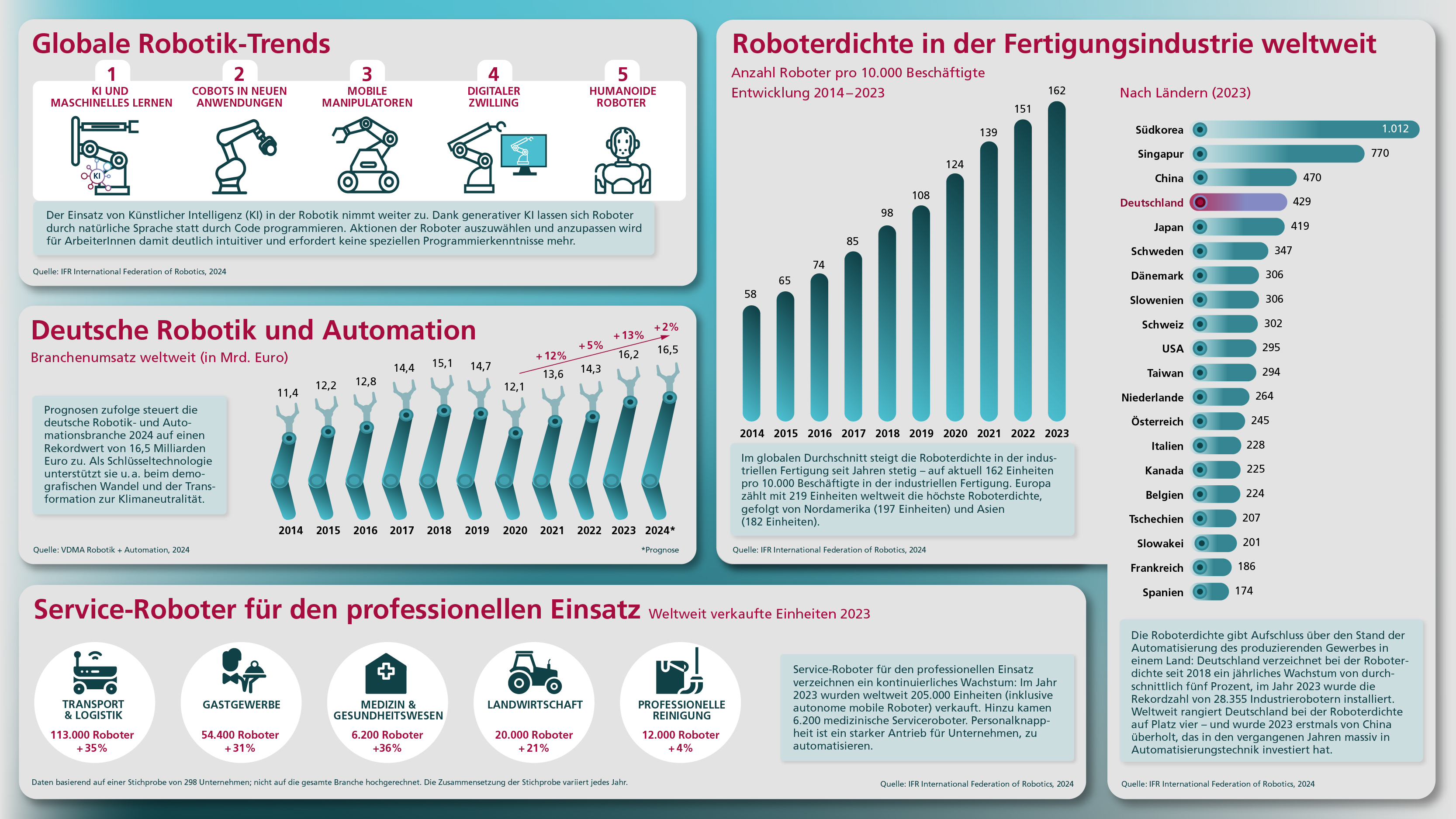
Expertinnen und Experten sehen in der Robotik großes ökonomisches Potenzial. Den in einer acatech-Publikation veröffentlichten Prognosen zufolge steigt das globale Marktvolumen bis Ende des Jahrzehnts auf über 250 Milliarden US-Dollar. Dominiert wird der Markt danach von Servicerobotik. Aber auch für neuere Robotiktypen wie insbesondere kollaborative Roboter (Co-Bots), aber auch humanoide Universalroboter in der Produktion wird mit Zuwächsen gerechnet. Bereits in den vergangenen zehn Jahren hat sich die Roboterdichte in der Produktion weltweit nahezu verdreifacht (siehe Grafik).
Neben dem Wirtschaftsfaktor heben Expertinnen und Experten den Beitrag der Robotik zur Bewältigung großer gesellschaftlicher Herausforderungen hervor. In Deutschland und Europa entwickelte und produzierte Roboter sind für das Erreichen von technologischer Souveränität, Resilienz und Nachhaltigkeitszielen von großer Bedeutung, so die acatech-Analyse. Konkret kann KI-basierte Robotik beispielsweise zur Etablierung einer Kreislaufwirtschaft beitragen (siehe ), Menschen bei der körperlichen Rehabilitation unterstützen (siehe ) oder Fachkräfte in der Pflege entlasten (siehe Anwendungsszenario).
Deutschland ist gut aufgestellt, die Potenziale der KI-unterstützten Robotik zu realisieren: In der Forschung zeugt davon der international hohe Anteil an wissenschaftlichen Publikationen an der Schnittstelle von Robotik und KI. Beim Einsatz von klassischen Industrierobotern im Verhältnis zur Anzahl der Beschäftigten in der Fertigungsindustrie (Roboterdichte) liegt Deutschland seit Jahren weltweit auf den vorderen Plätzen – aktuell auf Platz drei hinter Südkorea und Singapur (siehe Grafik).
Weichen für weitere Wettbewerbsfähigkeit
Damit Deutschland in der zunehmend KI-unterstützten Robotik weiterhin eine wichtige Rolle spielt, müssen die Weichen heute gestellt werden. Wichtige Anforderungen sind:
- Möglichkeit zur Produktion von Klein- und Mittelserien von Robotern, die einfach zu programmieren sind oder ganz ohne Programmierung per Interaktion angewiesen werden können. Dies ermöglicht es auch kleinen und mittleren Unternehmen (KMU) sowie Handwerksbetrieben, Roboter ohne größeren (Ressourcen-)Aufwand einzusetzen (siehe ).
- Entwicklung von Robotern, die sich an den Menschen und seine Umgebung anpassen, flexibel eine Vielzahl von Aufgaben ausführen und mit vielen Unsicherheiten umgehen können – und dabei trotzdem immer den Aspekt der funktionalen Sicherheit einbeziehen.
Technologisch betrachtet gelten u.a. folgende Entwicklungswege als vielversprechend:
- Kombination von Basismodellen und Robotik (siehe Interview mit Sven Behnke)
- Lernen durch Interaktion (siehe Interview mit Dorothea Koert) und variable Autonomie (siehe Whitepaper Kompetent im Einsatz)
- Föderiertes Lernen in der Robotik (siehe aus Whitepaper Edge AI)
- Hybride KI und Robotik (siehe KI Kompakt – Hybride KI)
Wo und wie arbeiten wir künftig mit Robotern zusammen?
Expertinnen und Experten der Plattform Lernende Systeme skizzieren mögliche Anwendungsbereiche – und welche Hürden auf dem Weg in die Praxis noch genommen werden müssen.
Barbara Deml
Karlsruher Institut für TechnologieSven Behnke
Universität BonnDorothea Koert
Technische Universität DarmstadtOskar von Stryk
Deutsches Rettungsrobotik-Zentrum

Prof. Dr.-Ing. Barbara Deml | Karlsruher Institut für Technologie
Barbara Deml ist Leiterin des Instituts für Arbeitswissenschaft und Betriebsorganisation am KIT und Mitglied der Arbeitsgruppe Arbeit/Qualifikation, Mensch-Maschine-Interaktion der Plattform Lernende Systeme.
Freund und Helfer: Wie Menschen und soziale Roboter zusammenarbeiten
Wie kann Künstliche Intelligenz (KI) sozial interaktive Robotik ermöglichen? Um das zu beantworten, muss man zunächst die Frage stellen: Was versteht man unter sozialen Robotern? Soziale Roboter sind ein Gegenentwurf zum Industrieroboter. Sie sind keine autonomen Werkzeuge, sondern interaktive Partner. Dazu zählen Spielzeugroboter, wie Roboterhunde, Serviceroboter im Bereich der Pflege oder Therapie, Kollaborationsroboter, sogenannte Cobots, im industriellen Kontext, aber auch Softwareroboter, wie Chatbots. Oft sind es auch Roboter, deren Gestalt einem menschlichen Körper ähnelt oder die menschenähnliche Eigenschaften aufweisen. Man spricht dann von humanoiden Robotern. Soziale Roboter sollen in der Lage sein, mit uns zu kommunizieren, um eine vertrauensvolle Beziehung aufzubauen. Das erfordert vor allem soziale Intelligenz, für die wiederum KI eine wesentliche Voraussetzung ist:
- KI ermöglicht es, menschliche Sprache und den Kontext von Gesprächen zu verstehen. Im Idealfall können soziale Roboter so eine menschenähnliche Konversation führen.
- Mittels KI können Gesichter erkannt und Mimik oder Gesten analysiert werden. Das erlaubt es sozialen Robotern, Emotionen oder Handzeichen zu erkennen und angemessen darauf zu reagieren.
- Durch maschinelles Lernen kann ein Roboter aus Erfahrungen oder durch Beobachtung lernen. Soziale Roboter können sich so an individuelle Präferenzen und Bedürfnisse ihrer Benutzer anpassen. Das ermöglicht personalisierte Interaktionen.
Wie kann ein Roboter menschliche Emotionen wie Stress erkennen? Wie erkennen wir Menschen, ob unsere Mitmenschen gestresst sind oder ob sie sich zum Beispiel freuen oder ärgern? In der Regel interpretieren wir unbewusst den Kontext sowie verschiedene verbale und non-verbale Signale wie Lächeln, Stirnrunzeln, Augenbrauenheben oder andere Gesichtsbewegungen. Auch, die Art und Weise, wie jemand spricht – einschließlich Tonfall, Geschwindigkeit und Betonung – kann viel über unsere emotionale Verfassung verraten. Dazu gibt es in der Psychologie eine lange Forschungstradition. Viele dieser Verhaltensindikatoren sind heute gut beschrieben und lassen sich mittlerweile auch durch technische Sensoren eines Roboters beobachten. Fortschritte in der Sprache-, Bild- und Videoanalyse ermöglichen es Robotern, Körperhaltungen, Gesichtsausdrücke, Pupillenreaktionen, Änderungen im Tonfall oder der Sprechgeschwindigkeit zu erkennen. Roboter können Bewegungsmuster oder das Interaktionsverhalten mit technischen Geräten analysieren. Eine Kombination aus mehreren solcher Sensorinformationen ermöglicht es dann auf Emotionen zu schließen. Aber, natürlich gelingt das nicht immer hundertprozentig. Auch wir Menschen liegen mit unserer Emotionserkennung nicht immer richtig.
Wie kann eine humanoide Robotik menschengerecht in der Pflege zum Einsatz kommen?
Eine menschengerechte Technikgestaltung stellt immer die Bedürfnisse, Fähigkeiten und Präferenzen der Benutzer in den Mittelpunkt. Genauso verhält es sich, wenn humanoide Roboter in der Pflege eingesetzt werden sollen. An oberster Stelle steht die Frage: Was sind die Bedürfnisse, Fähigkeiten und Präferenzen der Pflegekräfte und der Pflegenden bei der Interaktion mit einem Roboter?
- Humanoide Roboter können entwickelt werden, um älteren oder pflegebedürftigen Menschen bei alltäglichen Aufgaben zu helfen, wie beim Aufstehen, Anziehen, Zubereiten von Mahlzeiten und anderen grundlegenden Tätigkeiten. Das kann die Unabhängigkeit der Menschen fördern und gleichzeitig das Pflegepersonal entlasten.
- Humanoide Roboter können mit Sensoren ausgestattet werden, um die Umgebung zu überwachen und Alarm zu schlagen, wenn ungewöhnliche Aktivitäten oder Notfälle erkannt werden. Das ist besonders nützlich in Pflegeeinrichtungen oder bei älteren Menschen, die allein leben.
- Roboter können dazu verwendet werden, Medikamente zu verteilen und daran zu erinnern, dass sie eingenommen werden müssen. Das ist besonders wichtig für Menschen mit komplexen Medikamentenplänen.
- Humanoide Roboter können so gestaltet werden, dass sie soziale Interaktionen ermöglichen und Gesellschaft leisten können. Das kann insbesondere für ältere Menschen wichtig sein, die sich möglicherweise einsam fühlen.
Es ist wichtig, dass humanoide Roboter in der Pflege ethisch und sensibel eingesetzt werden. Das beinhaltet die Berücksichtigung der Privatsphäre und die Gewährleistung der Sicherheit. Humanoide Roboter sind nicht dazu gedacht, menschliche Pflegekräfte zu ersetzen, sondern vielmehr, um sie zu unterstützen und die Pflegequalität zu verbessern.
Video-Reihe "Nachgefragt": Zum Interview mit Prof. Dr.-Ing. Barbara Deml

Prof. Dr. Sven Behnke | Universität Bonn
Sven Behnke ist Leiter des Instituts für Informatik VI – Intelligente Systeme und Robotik an der Universität Bonn und Mitglied der Arbeitsgruppe Lernfähige Robotiksysteme der Plattform Lernende Systeme.
Der Mensch als Vorbild: Lernen aus wenigen Daten
Roboter sind in der industriellen Massenproduktion von großem Nutzen. Ohne Industrieroboter, die repetitive Aufgaben übernehmen, würde in Deutschland kein Auto mehr hergestellt. Mobile Roboter transportieren beispielsweise Regale in Warenlagern oder Mahlzeiten in Krankenhäusern. Einfache Roboter helfen bereits im Haushalt, etwa bei der Bodenreinigung oder der Rasenpflege.
Damit Roboter sich nützlich machen können, ist derzeit eine enge Aufgabendefinition erforderlich, zum Beispiel „Bewege ein Objekt von A nach B!“. Auch muss die Einsatzumgebung strukturiert werden, beispielsweise durch Bereitstellung des Objekts an bekanntem Ort in bekannter Lage. Die Forschung arbeitet an neuen Anwendungsbereichen für Roboter: In Zukunft sollen sie direkt mit Menschen in der Produktion zusammenarbeiten, assistenzbedürftigen Personen im Alltag helfen oder Einsatzkräfte bei der Bewältigung von Katastrophen unterstützen. Diese offenen, komplexen Anwendungsdomänen erfordern jedoch mehr kognitive Fähigkeiten als derzeitige autonome Roboter haben. Bereits heute können ferngesteuerte Roboter mithilfe der menschlichen Intelligenz ihres Bedieners zahlreiche Aufgaben in komplexen Umgebungen lösen. Dabei versetzt Teleoperation einen Menschen in einen Avatar-Roboter. Die menschliche Bedienperson kommt mühelos mit neuen Situationen klar und kann ihr vorhandenes Wissen flexibel auf die aktuellen Gegebenheiten übertragen. Sie erkennt Probleme bei der Ausführung und entwickelt schnell Handlungsalternativen.
Wie können wir Roboter mit kognitiven Fähigkeiten ausstatten?
In den letzten Jahren wurden durch Deep Learning beeindruckende Erfolge in verwandten Bereichen erzielt, zum Beispiel bei der visuellen Wahrnehmung, der Spracherkennung und -synthese sowie bei Dialogsystemen wie ChatGPT. Diese beruhen auf dem Training großer Modelle mit gigantischen Datenmengen. Solche Basismodelle erfassen umfangreiches Weltwissen und können beispielsweise durch Transfer-Lernen oder In-Kontext-Lernen schnell auf spezifische Aufgabenstellungen angepasst werden. Wie können wir diese Erfolgsstory nun auch für die Robotik fortschreiben? Erste Schritte in diese Richtung sind multimodale Modelle, die nicht nur mit einer Modalität – also ausschließlich Texten, Bildern oder Sprache – trainiert werden, sondern mit Daten aus mehreren Modalitäten wie etwa CLIP von OpenAI. Auch wenn die Gewinnung von echten robotischen Interaktionsdaten aufwändig ist, gibt es Initiativen zur Zusammenführung von Daten verschiedener Roboter und Aufgaben, z.B. Open X-Embodiment. Damit können trainierte Modelle eine Vielfalt von Manipulationsaufgaben besser lösen als Modelle, die nur mit spezifischen Daten trainiert wurden.
Eine weitere Möglichkeit ist es, Interaktionen in einer Simulation zu erzeugen. Hierbei sind die Herausforderungen, die Simulation realistisch zu gestalten sowie das in der Simulation Erlernte auf die Realität zu übertragen (Sim2Real-Gap).
Lernen aus großen Datenmengen auch in der Robotik?
Das menschliche Vorbild zeigt uns, dass dateneffizientes Lernen möglich ist. Hierfür sind spezifische Lernmodelle erforderlich, die evolutionär optimiert wurden und durch Verwendung von Vorwissen – induktives Bias – wenig Daten erfordern. So können wir zwar nicht mehr beliebige Aufgaben lernen, aber dafür die Aufgaben schneller und besser erlernen, welche das Leben uns stellt.
Um eine vergleichbare Dateneffizienz bei Robotern zu erreichen, werden ähnliche Lernmodelle benötigt, die ein passendes induktives Bias haben. Hier ist aus meiner Sicht eine Orientierung an der Struktur des menschlichen kognitiven Systems hilfreich. Insbesondere benötigen Roboter nicht nur ein schnelles, paralleles sensomotorisches System 1 für Routineaufgaben, sondern auch ein System 2 für höhere kognitive Funktionen, wie Planung oder die Einschätzung der eigenen Grenzen.
Bei passender kognitiver Architektur bietet die Teleoperation große Chancen, um Schritt für Schritt menschliche Kompetenzen auf autonome Funktionen zu übertragen und so immer weniger auf Menschen als Bedienpersonen angewiesen zu sein.
Video-Reihe "Nachgefragt": Zum Interview mit Prof. Dr. Sven Behnke

Dr. Dorothea Koert | Technische Universität Darmstadt
Dorothea Koert ist Leiterin der Nachwuchsgruppe IKIDA am Intelligent Autonomous Systems Lab der TU Darmstadt und Mitglied der Arbeitsgruppe Lernfähige Robotiksysteme der Plattform Lernende Systeme.
Wie Roboter lernen
Die möglichen Aufgaben, die Roboter in Zukunft im Alltag übernehmen können, sind vielfältig – ebenso wie die Vorlieben ihrer Benutzer, auf welche Weise sie durch einen Roboter unterstützt werden wollen. Dies macht eine reine Vorprogrammierung zukünftiger Roboter fast unmöglich. Die Fähigkeit, neue Aufgaben in Interaktion mit Menschen zu erlernen, wird daher zu einer Schlüsselkomponente für die Entwicklung intelligenter Robotersysteme.
Um einem großen Teil der Gesellschaft die Teilhabe an lernfähigen Robotern zu ermöglichen, ist es dabei essenziell, dass Roboter in der Lage sind, auch von Alltagsnutzenden ohne Programmiervorkenntnisse neue Aufgaben zu erlernen.
Lernen von Demonstrationen und Feedback
Zwei vielversprechende Ansätze, wie Roboter von Menschen lernen können, sind das Lernen von Demonstrationen und das interaktive Reinforcement-Lernen. Beim Lernen von Demonstrationen können Roboter entweder vom Menschen "an die Hand genommen" und durch die Aufgabe geführt werden oder sie beobachten Menschen, die selbst eine Aufgabe durchführen, probieren anschließend das Gesehene zu verstehen und zu kopieren. Menschliche Demonstrationen können dabei zum einen genutzt werden, um bekannte Teilaufgaben wiederzuerkennen und in neuer Reihenfolge auszuführen, sowie um komplett neue Bewegungs- und Aufgabenabläufe zu erlernen.
Beim interaktiven Reinforcement-Lernen hingegen nutzen Roboter durch Interaktion mit Menschen gewonnenes Feedback, um vorher Erlerntes iterativ zu verbessern. Menschen können dabei Roboter während der Ausführung ihrer Aufgaben bewerten. So können Roboter zusätzlich auch persönliche Präferenzen ihrer Nutzer für Aufgabendurchführungen lernen. Feedback kann hierbei entweder explizit zum Beispiel über Tablet oder Spracheingabe gegeben werden, oder Roboter lernen durch implizites Feedback, also dadurch, wie ihr Verhalten menschliches Verhalten oder den Erfolg der Aufgabendurchführung beeinflusst.
Menschliche Fehlerquellen beim Lernen
Lernfähige Robotiksysteme, die durch direkte Interaktion mit Menschen lernen und zuvor Gelerntes verbessern können, verfügen über großes Potenzial in vielen Einsatzbereichen. Voraussetzung: Die Roboter sind sicher. Eine wichtige Frage aktueller Forschung ist daher, wie man Roboter und die von ihnen genutzten Algorithmen gegen fehlerhafte oder unerwünschte menschliche Demonstrationen absichern kann. Im Gegensatz zu klassisch programmierten Robotern sollte bei lernfähigen Robotiksystemen zum Beispiel sichergestellt werden, dass sie potenzielle Unsicherheiten oder Inkonsistenz in menschlichem Feedback verstehen. Ebenso wichtig ist es, dass die Roboter einen zuvor definierten Kernaufgabenbereich auch durch menschliche Demonstrationen nicht verlassen können.
Die Entwicklung von sicheren und menschenzentrierten zukünftigen Lernalgorithmen erfordert deswegen insbesondere interdisziplinäre Forschung aus Kognitionswissenschaften, Robotik und maschinellem Lernen. Ziel ist es zu verstehen, wie Menschen Demonstrationen und Feedback geben und geben wollen, um zu erkunden, wie die Roboter der Zukunft davon am besten lernen können.

Empfohlener redaktioneller Inhalt
An dieser Stelle finden Sie einen externen Inhalt von YouTube, der den Artikel ergänzt. Sie können ihn sich mit einem Klick anzeigen lassen und wieder ausblenden.









Entwicklungen und Trends in der Robotik
Auf einen Blick: Welche technologischen Innovationen prägen die Robotik-Branche? Wo sind Service-Roboter aktuell im Einsatz? Wie entwickelt sich die Verbreitung von Robotern weltweit – und wo steht Deutschland? Zahlen dazu liefert unser Dashboard.
{kind=link}
Publikationen zum Thema

- Plattform Lernende Systeme
- KI in der Robotik - Flexible und anpassbare Systeme durch interaktives Lernen
- 2025
- Bundesministerium für Bildung und Forschung
- Aktionsplan Robotikforschung: Innovationspotenziale der KI-basierten Robotik erschließen
- 2023

- acatech
- Innovationspotenziale KI-basierter Robotik
- 2023
- Plattform Lernende Systeme
- KI Kompakt Hybride KI
- 2023
- Rat für technologische Souveränität
- Positionspapier Smarte Robotik
- 2023